30 Januari 2016
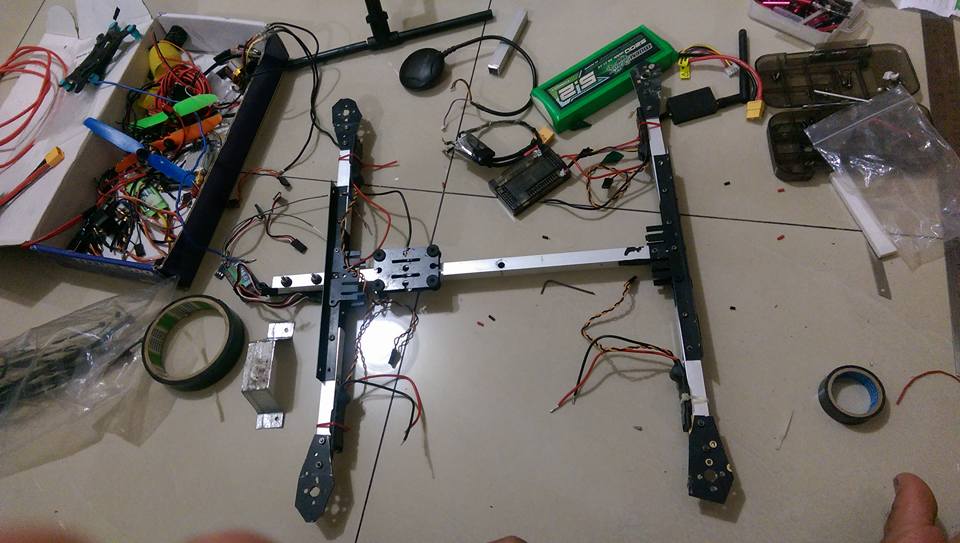
setelah selesai dirakit selasa kemarin, versi 2.1 bakalan
ane tes terbang di lapangn sore ini bareng om nendra.
sampai di lapangan, gak langsung terbang karena masih
menunggu teman baru nendra yang bakal nerbangin rc pesawatnya.
lebih dri 20 menit nunggu, belum juga ada tanda tanda si
teman baru datang. mungkin karena jalanan macet sore malam minggu, beliaunya
berangkat dari tambun soalnya.
akhirnya kami memutuskan take off duluan, si versi 2.1
terbang normal, tpi beberapa motor masih terlihat getar karena mungkin ada yang
gak balance propellernya atau esc nya.
baru satu menit terbang, eh ada rintik rintik air turun..
wehhhh...
lansung landing cepet cepet, dipak seadanya, langsung cabut
ke rumah...
31 Januari 2016
abis dhuhur, sempet konsep lagi alu versi 2.1 nya. buat
mengeliminasi getaran propeller yang menggila, konsep mounting motornya aku
ubah dari sebelumnya berbahan serat nylon yang diattach ke batang lengan frame
alumunium, sekarang motornya directly attached ke lengan frame alumunium.
untuk itu, aku potong lagi holo alumunium karena lengan asli
2.1 kurang panjang. sekarang aku bikin lebih besar ukuran motor to motornya
buat mengakomodasi propeller 10.45 oem. so nanti bisa tes pakai prop 9.45 asli
DJI E310 dan 10.45 oem. jadilah frame v2.2
tes terbang sore ditemani rayhan dan nendra beserta
krucil-krucilnya.
terbang awal lancar jaya pakai prop 10.45, tapi yang
bermasalah sekarang adalah TX RX nya, dua kali RTL initiated padahal jaraknya
masih dekat banget... di tengah lapangan dan di sisi kanan lapangan. untung
landing RTL nya presisi di posisi take off awal :) mungkin karena GPS nya
sekarang ane mount pakai holder yang tinggi ya hehe, (beli 50 rebu di jaknot).
oiya dual antena RX nya juga udah aku mount pake formasi V dengan bantuan
holder alumunium bikinan dewek, tetep aja gampang lost.. wew..
sempet jatuh karena manuver terlalu rendah n throtle kurang
:{
gak ada kerusakan fisik, tapi pas terbang gyro/acceleratornya
error.. di tower keliatan muter muter mbolak mbalik quadnya, padahal dia lagi
diem..
ane buka casingnya, n reset APM nya, balik lagi normal..
terbang lagi tapi pas ketinggian +-15 meter, tiba tiba v.2.2
susah dikendaliin, gak terasa terbang menuju sawah berair.. wew.. susah payah
aku balikin arahnya, eh di bawah banyam anak anak lari larian, meluncur ke
bawah arah pohon.. dah duar... nabrak pohon dah...
kerusakan fisik minor, GPS holdernya lepas, karena emang
cuman ane lem kejar target kemarin mo test flight hehe.
akhirnya GPS ane tempel aja di tutup batere, efeknya, lock
GPS lamo nian... HDOP nya juga tinggi bener, tapi pas udah ngelock, normal
normal aja.
buat jaga jaga, terbang rendah jarak dekat dengan attitude
yang lemah lembut hehe. hasilnya, terbang normal kuat sampe 20 menitan batas
batere 3.6 per cell..
setelah direviu, ada kelemahan signifikan dari frame H quad
ini.. karena posisi baterenya relatif selevel ama propeller, ketika ditabrak
angin kenceng, si quad gampang goyang karena gak punya pemberat di bawah..
hmm.. kayaknya asyik ni bikin experimen buat DIY alumunium
frame quad dihedral :)